







保定焊接机器人-保定焊接机器人租赁-天津理想动力(多图)
js3845金沙线路
经营模式:生产加工
地址:天津市宁河区新华科技城B26-4
主营:天津打磨机器人,天津分拣机器人,天津焊接机器人
业务热线:022-26521101

产品详情
联系方式
产品品牌:理想动力
供货总量:不限
价格说明:议定
包装说明:不限
物流说明:货运及物流
交货说明:按订单
有效期至:长期有效
保定焊接机器人-保定焊接机器人租赁-天津理想动力(多图)
天津码垛机器人,码垛机器人,天津焊接机器人
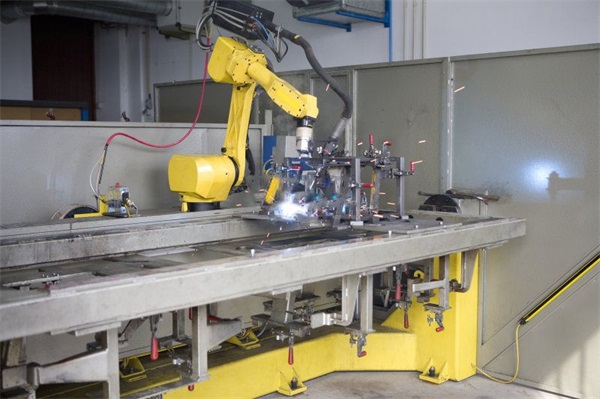
点焊机器人手臂上所握焊包括电极,电缆、气管,冷却水管及焊接变压器,点焊机器人机械手配件较多,所以点焊机器人的焊相对比较重,会要求手臂的负重能力强。点焊机器人需要有足够的负载能力才能支撑。点焊机器人是什么?而现在采用直流后交流伺服电机驱动方式已满足要求,其重复定位精度可达到+0.30~土1mm,质量确保一致,因此在工业机器人中仍占有较大的比例。









定期维护:按照机器人制造商的建议,制定一个定期维护计划,并确保按时执行。这包括清洁、润滑、更换磨损部件等。
培训操作人员:让操作人员接受相关的培训,熟悉机器人的操作、编程和维护知识。合格的操作人员能够正确操作机器人,并及时发现并解决潜在问题。
环境条件:为焊接机器人提供适宜的工作环境。保持周围空气清洁,避免灰尘、水分和其他污染物进入机器人系统。保持适宜的温度和湿度,以确保机器人正常运行。
安全措施:安全措施包括安装防护罩、安全光幕、急停按钮等,以保障操作人员和设备的安全。保持机器人周围的工作区域清晰并标识明确的警示标志。

1、工作负载和工作范围:根据焊接任务的工作负载和工作范围确定外部轴的承载能力和运动范围。外部轴应能够承受焊接工件的重量,并提供足够的运动自由度以覆盖焊接区域。
2、焊接姿态要求:焊接任务可能需要在不同的姿态下进行,如平面焊接、立体焊接等。根据焊接姿态的要求选择外部轴的类型和运动方式,确保能够实现所需的姿态调整和工作灵活性。
3、焊缝形状和长度:焊缝的形状和长度对外部轴的选配也有影响。较长或复杂的焊缝可能需要更大的工作范围和灵活性,因此需要选择具备适当尺寸和运动能力的外部轴。


黎先生先生
手机:18622365088



